概要
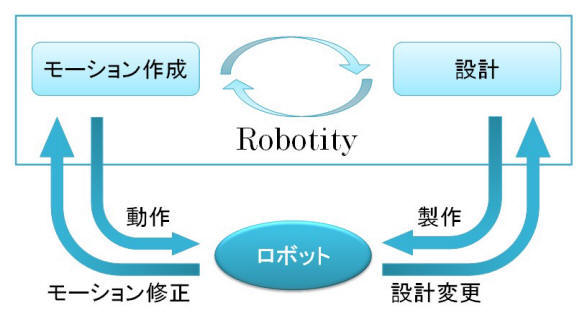
多脚歩行ロボットの開発を支援するために、目的とするモーションを実現するための設計値の算出と、設計変更によるモーションへの影響をシミュレートできます。
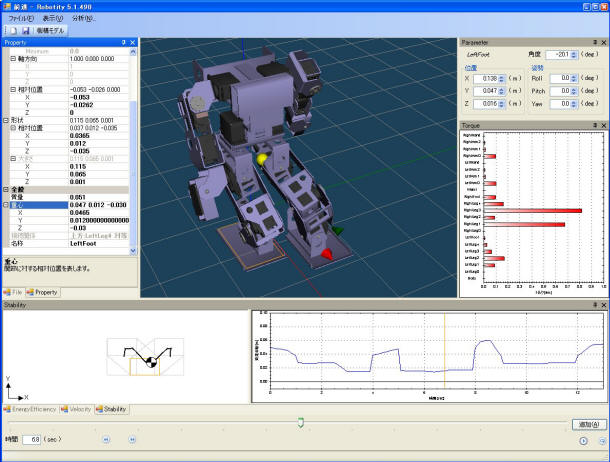
実行イメージ
特徴
柔軟な設計変更を可能にする物理計算エンジン
- 構造に依存せずに、逆運動学を求解できる
… 関節の軸を直交させる必要はなく、設計の制限を低減します。 - 制限のない関節数
… 任意に関節を追加できます。 - モーションへの影響をリアルタイムにシミュレート
… 設計変更の妥当性を検証しながら設計できます。
直感的なインターフェイス
- 3Dによるアニメーション表示
… ロボットの姿勢や構造の確認を容易にし、モーションの把握を助けます。
その他
掲載歴
LOGiN 2006年12月号 (株)エンターブレイン