視点とカメラの注視対象との位置関係の設定
視点とカメラの注視対象との、位置関係を設定する方法を解説します。
DeviceインスタンスのTransform.Viewプロパティ (ビュー トランスフォーム行列) に、LookAtLHメソッドで作成した行列を設定します。
public static Matrix LookAtLH(
Vector3 cameraPosition, // 視点の位置
Vector3 cameraTarget, // 目標の位置
Vector3 cameraUpVector // 上方を示すベクトル
);
Matrix.LookAtLH(Vector3,Vector3,Vector3) | MSDN
計算式
このメソッドは、
zaxis = normal( cameraTarget - cameraPosition )
xaxis = normal( cross( cameraUpVector, zaxis ) )
yaxis = cross( zaxis, xaxis )
のような演算を行います。演算結果の行列は、
| xaxis.x | yaxis.x | zaxis.x | 0 |
| xaxis.y | yaxis.y | zaxis.y | 0 |
| xaxis.z | yaxis.z | zaxis.z | 0 |
| -dot(xaxis, cameraPosition) | -dot(yaxis, cameraPosition) | -dot(zaxis, cameraPosition) | 1 |
であり、コードで表すと
Vector3 zaxis = Vector3.Normalize( cameraTarget - cameraPosition ); Vector3 xaxis = Vector3.Normalize( Vector3.Cross( cameraUpVector, zaxis ) ); Vector3 yaxis = Vector3.Cross( zaxis, xaxis ); Matrix matrix = new Matrix(); matrix.M11 = xaxis.X; matrix.M12 = yaxis.X; matrix.M13 = zaxis.X; matrix.M14 = 0.0f; matrix.M21 = xaxis.Y; matrix.M22 = yaxis.Y; matrix.M23 = zaxis.Y; matrix.M24 = 0.0f; matrix.M31 = xaxis.Z; matrix.M32 = yaxis.Z; matrix.M33 = zaxis.Z; matrix.M34 = 0.0f; matrix.M41 = -Vector3.Dot( xaxis, cameraPosition ); matrix.M42 = -Vector3.Dot( yaxis, cameraPosition ); matrix.M43 = -Vector3.Dot( zaxis, cameraPosition ); matrix.M44 = 1.0f;
となり、これは
Matrix matrix = Matrix.LookAtLH( cameraPosition, cameraTarget, cameraUpVector );
と同じ結果を返します。
極座標系 (polar coordinate system)
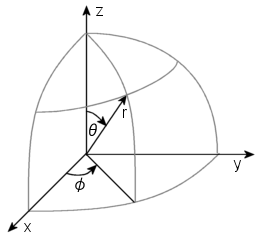
動径をr、天頂角をθ、方位角をφとするとき、極座標系 (r,θ,φ) と直行座標系 (x,y,z) との間には、

の関係があります。よって極座標系から視点の位置は、
float radiusVector; // 動径 float zenithAngle; // 天頂角 [deg] float azimuthAngle; // 方位角 [deg] float radius = radiusVector; float theta = Geometry.DegreeToRadian( zenithAngle ); float phi = Geometry.DegreeToRadian( azimuthAngle ); // 視点の位置 Vector3 cameraPosition = new Vector3( ( float )( radius * Math.Sin( theta ) * Math.Cos( phi ) ), ( float )( radius * Math.Sin( theta ) * Math.Sin( phi ) ), ( float )( radius * Math.Cos( theta ) ) );
のようにして求められます。