分析機能
モーション作成と設計を支援する機能について解説します。
エネルギー効率
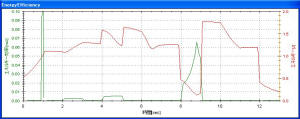
単位エネルギーあたりのX方向 (前進方向) への移動距離を、エネルギー効率として表します。これによりモーションの無駄を省けます。また設計変更時にはこの項目も更新されるので、エネルギー効率を高めるように設計を見直すことも可能です。
そのモーションが何を目的としているかによって、効率を求める指標は変化するものと考えられます。現在では前方へ移動することしか考慮していないため、このような算出方法をとっていますが、今後はこれも選択できるようにします。
速度
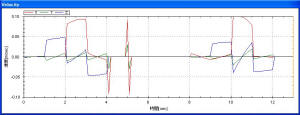
現在選択されているリンクについて、X、Y、Z方向の3成分の速度を表します。無駄な動きの分析、所望の速度の実現に使用できます。
現時点では関節の角加速度を無限大として求めているので、速度変化が大きくなっています。加速度を考慮するようにして、これも修正します。
安定性
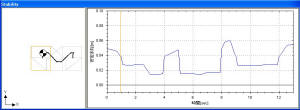
重心の床面への投影点と、支持多角形を構成する辺との最短距離である安定余裕から、安定性を評価できます。
支持多角形と重心投影点の時間変化を左のグラフで表し、右には安定余裕の時間変化を表示しています。
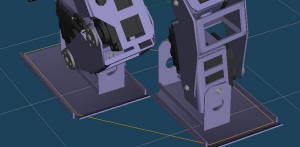
トルク
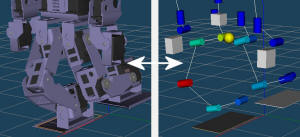
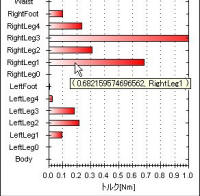
静止状態において、その姿勢を維持するのに必要とされる各関節のトルクを算出します。3Dモデル上では、その分布と大きさをグラフィカルに表示します。
トルク分布を考慮することで、適切にアクチュエータを配置できます。またモーション作成時、過負荷とならないように確認しながら作業できます。
アクチュエータ スペック
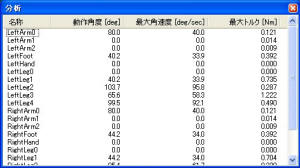
各関節のアクチュエータに要求されるスペックを算出します。これにより最適なアクチュエータを選定でき、既存の設計の無駄を省けます。
ここでのスペックは、そのモーションを実行するのに必要とされる各関節の最大値で、動作角度、角速度、トルクの3項目について分析を行います。現状では1つのモーションしか分析対象としていませんが、今後は既存のモーションすべてを分析することで、そのロボットへの要求を求められるようにします。