モーションの作成方法
ロボットのある瞬間の姿勢をポーズと呼び、モーションは連続するポーズから構成されます。ここでは、そのモーションの作成方法について解説します。
作成手順
モーション作成では、いつの瞬間であるかを指定してから、そのときのポーズを作成していきます。作成したポーズとポーズの間は自動的に補完され、モーションとなります。
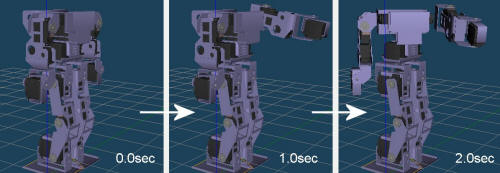
Pose
Motion
ポーズの作成
ロボットを構成する各リンクの位置と姿勢、または関節の回転角を指定します。
位置や姿勢を指定したときにはそこに接続されるリンクの回転角を逆運動学で算出し、回転角を指定したときには影響を受けるリンクの位置と姿勢を順運動学で求めます。
現在では数値入力による指定しか認めていませんが、将来的には3Dモデルをマウスでドラッグして位置などを指定できるようにします。(以前のバージョンでは実現していた機能です)

3Dビューで移動させたいリンクを選択した後、位置と姿勢もしくは関節角度を設定します。
リンクをダブルクリックすることで、可能ならば床面に水平に接地させることができます。
ポーズの追加
新しいポーズを追加するには、[追加]ボタンをクリックします。その時点でのモーションの最後のポーズが複製され、既定の時間が追加されます。
ポーズの指定
編集するポーズを指定するには、時間をそのポーズに合わせます。ポーズの編集に伴い、補完により自動生成された前後のポーズは、編集されたポーズを起点に自動的に補正されます。
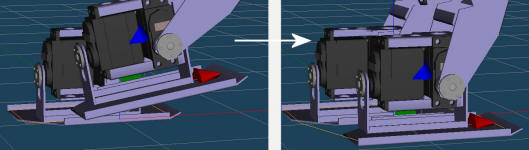
アニメーション表示
作成したモーションをアニメーション表示させて、モーションを確認できます。また機構モデルでの表示時には、関節のトルク変化を色で表現します。
保存と読込
モーションの保存
モーションに名前を付けて、ファイルに保存します。保存場所は、作業フォルダ内の選択されているフォルダです。
モーションの読込
ファイルパネル上で、読み込みたいモーションのファイルをダブルクリックします。